HYDRAULIKK I UNDERVANNSINTERVENSJON – I
Av Terje Ollestad, Innova AS og Kurt Wiig, Kurt Wiig AS
Denne artikkelen ble orginalt utgitt i FFU nytt nr 1 i 2002 som en del av en serie om undervannshydraulikk.
Litt historikk
Hydraulikk har vært, og er ennå, det primære overføringsmediet av effekt til sluttbrukere i undervanns intervensjonsutstyr. Det finnes teoretisk sett mer effektive måter å gjøre det på, men basert på praktisk tilgjengelige komponenter har hydraulikken tilbudt den beste kombinasjonen av:
- Tilgjengelighet av komponenter
- Effekt-tetthet & vekt
- Effektregulering
- Robusthet mot miljøpåvirkninger
- Pris
- Reparerbarhet
Dette, sammen med den kompetansen som var tilgjengelig på personellet som først tok systemene i bruk, gjorde at elektrohydraulisk drift ble, og fortsatt er, den vanligste metoden for drift av ROV’er, trenchere og intervensjonsverktøy.
Det har vært argumentert mye for bruk av direkte elektrisk drift, og mye bra utviklingsarbeid har vært gjort på det området, spesielt de siste 5 årene. Elektrisk drift kan muliggjøre høyere system-virkningsgrad, men det har vært begrenset tilgang på komponenter som kan brukes til å regulere effekten, som f.eks. turtallet på en thruster.
Et av problemene har vært at effektreguleringskomponenter har vært laget for relativt lave spenninger, og at strømstyrkene en da må opp i for å få den ønskede effekten har blitt upraktiske å håndtere.
Utviklingen innen kraftelektronikken har i økende grad frambrakt komponenter for høyere spenninger, og dette har brakt elektriske framdriftssystemer ett steg nærmere, men de aller fleste ROV’er og trenchere med elektrisk framdrift er fortsatt avhengige av en transformator nær sluttbrukerne, for å få en forsyningsspenning på 3000 V ned til f.eks. 600 V (som elektriske effektregulatorer kan håndtere). Dette undergraver i noen grad argumentet om at hydrauliske systemer har for mange omforminger av effekten før den når sluttbrukeren, siden de elektriske systemene fortsatt ennå er utsatt for noe av det samme.
En måte å omgå dette problemet på har vært å plassere effektreguleringen på overflaten for hver enkelt bruker, for så å overføre denne effekten via separate transformatorer, sleperinger og ledere fram til brukerne. Denne løsningen fjerner mye vekt og komponenter fra farkosten/verktøyet, men det blir relativt dyre og store sleperinger, “ustandard” umbilical med stort tverrsnitt (=stor vinsj) og en stor overflateenhet for kraftomforming og distribusjon.
Dette er akseptabelt for store og kraftige farkoster som skal arbeide:
- i liten hastighet
- på relativt grunt vann, med kort kabel utsatt for strøm o.l.
Men ikke for systemer som skal arbeide utsatt for strøm, eller som survey farkost i større fart over bunnen.
Servoteknikk eller proporsjonalteknikk?
Hydraulikken har også vært gjenstand for en betydelig utvikling innen komponentområdet siden de første kommersielle ROV’ene dukket opp for noen få tiår siden.
De aller fleste av de tidlige, kommersielle ROV-systemene var bygget i land som også har en betydelig flyindustri, og konstruksjonene er preget av tilgjengelige komponenter og konstruksjonsmetoder som var tilgjengelige fra fly- og militærteknologi.
Fly- og våpenteknologi krever små og lette komponenter, med meget rask respons. Reguleringsevne er viktigere enn virkningsgraden, siden få av brukerne har stort kontinuerlig effektbehov, men desto høyere behov for rask og nøyaktig respons (f.eks. en rorflate på en rakett). Det har også vært avgjørende at styringen krever lite strøm, for å holde drivere og ledninger små og lette.
Komponentene har vært i bruk i industrier som har meget velutviklede vedlikeholdssystemer, og spesialutdannet personell for hvert fagområde. Som en følge av dette har det vært fullt akseptert med komponenter som stiller meget store krav til oljerenhet, og det har også vært fullt akseptabelt med relativt korte levetider (målt i timer) på endel komponenter, så lenge disse er forutsigbare, og kan omgås ved vanntette systemer for komponentutskiftning. Måten enkelte deler brukes på i fly, medfører kanskje bruk bare noen få minutter i timen (flapsmotor), og samme komponent brukt kontinuerlig varer kanskje bare 700-800 timer.
I sentrale deler av Europa har hydraulikken i større grad blitt anvendt i industrien, og andre krav har ført til en prioritering av andre komponenter og løsninger. En av “vinnerne” i europeisk hydraulikk er proporsjonalteknikken, med egenskaper som på mange felt overlapper bruksområdene til servoventilene, men med noe ulike fordeler og ulemper.
Proporsjonalteknikk er basert på oppgradering av hydrauliske systemer som i utgangspunktet er laget for overføring av effekt, ikke for posisjonskontroll. Økende tilgang på elektronikk for å kontrollere ventiler o.l., har muliggjort bruk av direkte styrte elektriske ventiler til drift som ofte krever reguleringsmulighet.
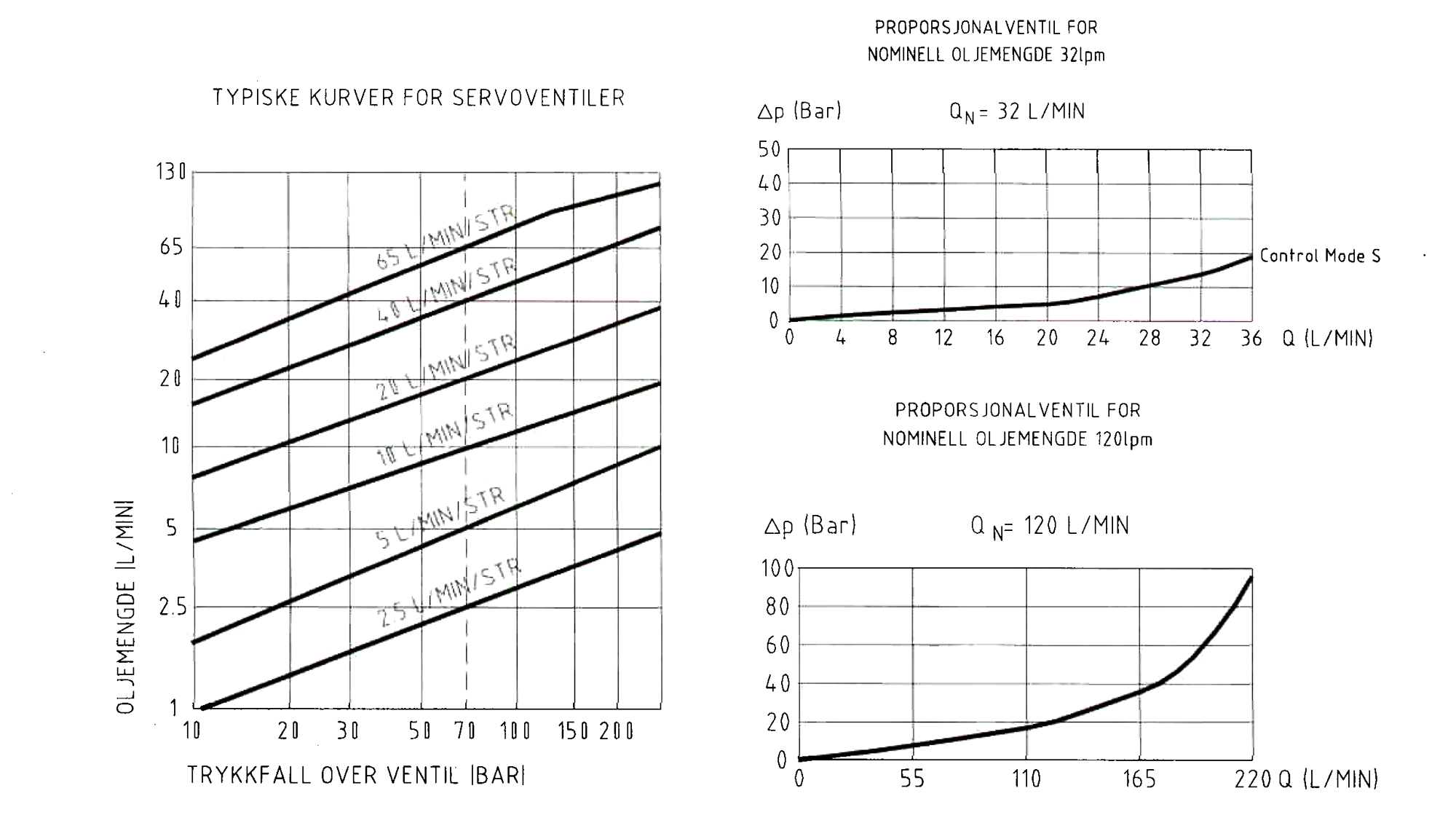
En direkte elektrisk styrt proporsjonalventil har svært liten intern lekkasje, lavt trykkfall ved stor gjennomstrømning (se kurver) og relativt stor robusthet mot forurensninger i oljen. En servoventil er normalt basert på en intern pilotstyring, som bl.a. krever et betydelig trykkfall over ventilen for å kunne fungere (se kurve), samt at den stiller større krav til oljerenhet. Som en kan se av kurvene, ligger en servoventil ved nominell oljemengde på typisk 70 bar trykkfall, mens en tilsvarende proporsjonalventil ligger i nærheten av 20 bar trykkfall.
More articles
HYDRAULIKK I UNDERVANNSINTERVENSJON – DEL III
Av Terje Ollestad, Innova AS og Kurt Wiig, Kurt Wiig AS Vi har tidligere i en artikkel omtalt fordeler og…