
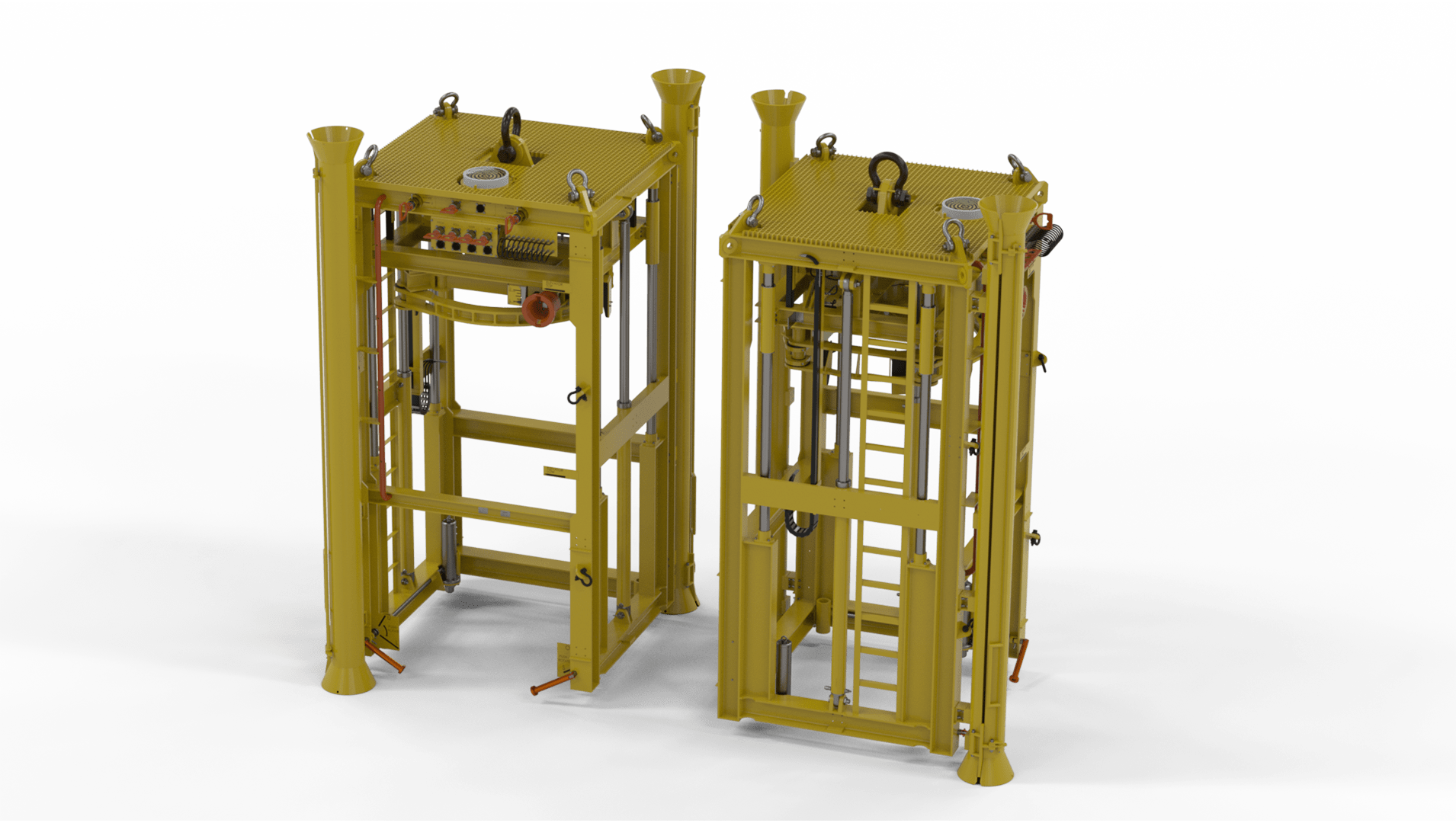
Actuator Running Tool
The Actuator Running Tool (ART) is designed and tested for retrieval and installation operation of subsea hydraulic actuators up to 10.500 kg.
Description
The actuator running tool is landed on subsea structure using configurable guideposts and mini-guideposts for fine guiding. Integrated soft-landing cylinders ensure controlled landing speed. The lifting operation within ART is hydraulically operated through a standard API 17H Hot Stab receptacle. Connection to actuator is done by clamping, and is operated by a API 17H Class 4 Torque Tool. Interlocks are mechanical and operated by ROV.
Key features
- DNV 2.7-3 Lifting frame
- Up to 5° landing angle
- Adjustment mechanism integrated
ART has successfully been tested with 5° offset on landing base, and integrated adjustment cylinders (pitch, roll, x- and y-plane movement) can be used for alignment with valve.
Technical Information
Size and height
Size (W x L x H): 2900 x 2300 x 4600 mm
Size w / skid (W x L x H): 2900 x 2300 x 5000 mm
Weight in air: 6200 kg
Weight in water: 5200 kg
Weight w / skid: 8500 kg
Interfaces
Actuator: Ø1440 flange
Clamp: API 17H Class 4 Torque Tool
Hydraulic: API 17H 2L Hot stab female
Guide funnel: 2 off ID 247.8 mm, c-c 2400 mm (configurable)
Mini guideposts: 4 off
ROV: D-handles, Grabber bar
Mechanical
Lifting certificate: DNV 2.7-3 R60 Subsea
Max. payload: 10.500 kg
Max. gross weight: 19.000 kg
Depth rating: 3000 meter
Transportation: Dedicated transport skid
Soft-landing: 2 off, closed loop, water based
Misalignment: Flex joint, adjustment cylinders
Hydraulic
System pressure: 207 bar
Elevator stroke: 1450 mm
Stroke, Pitch / Roll: 30 mm
Stroke, x- / y- plane: 70 mm
Elevator max force: 320 kN
Force, Pitch / Roll: 50 kN
Force, x- / y- plane: 91 kN
Load holding valves: On all cylinders
Contingency: Cutting loops on all lines
Material
Frame: Carbon Steel, System 7 coating
Brackets: 316L, S165M
Shafts / nuts: S165M, OM7-20
Bearings: Nylon, carbon reinforced
Protection brackets: POM-C



