
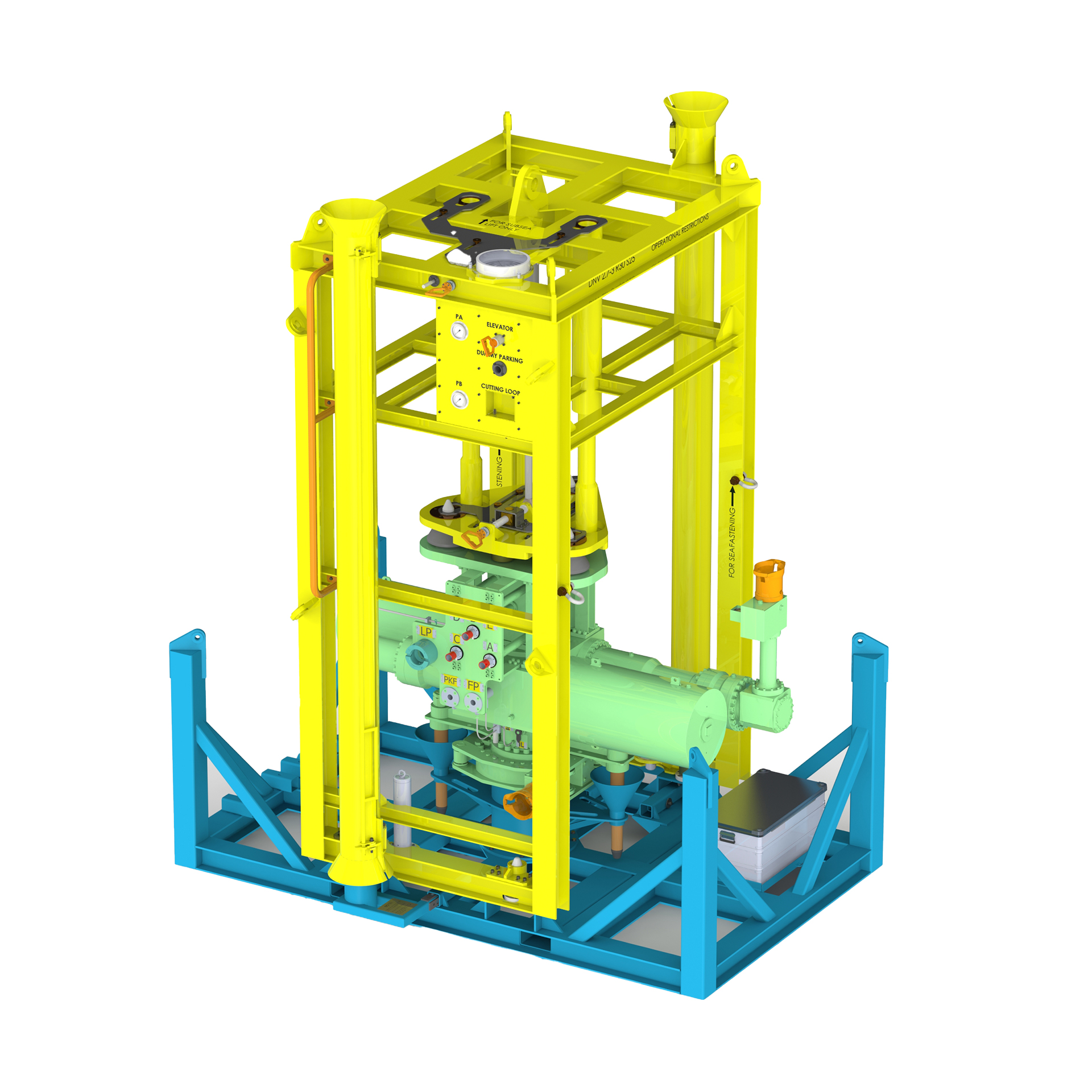
Actuator Running Tool – For Horizontal SSIV actuator
For Horizontal SSIV actuator
The tool is designed as a steel frame with hydraulic and mechanical operated functions designed to replace SSIV actuators.
Description
The ART is typically deployed from a surface vessel with a AHC crane. After landing on subsea structure, an ROV provides hydraulic power to the ART and performs series of tasks allowing picking the actuator up from the SSIV using a ISO 13628-8 Ø43 mm dual port hot stab.
The Subsea clamp for the SSIV secures the actuator in position on top of the SSIV. It is opened or closed using an ISO 13628-8 Class 4 Torque tool.
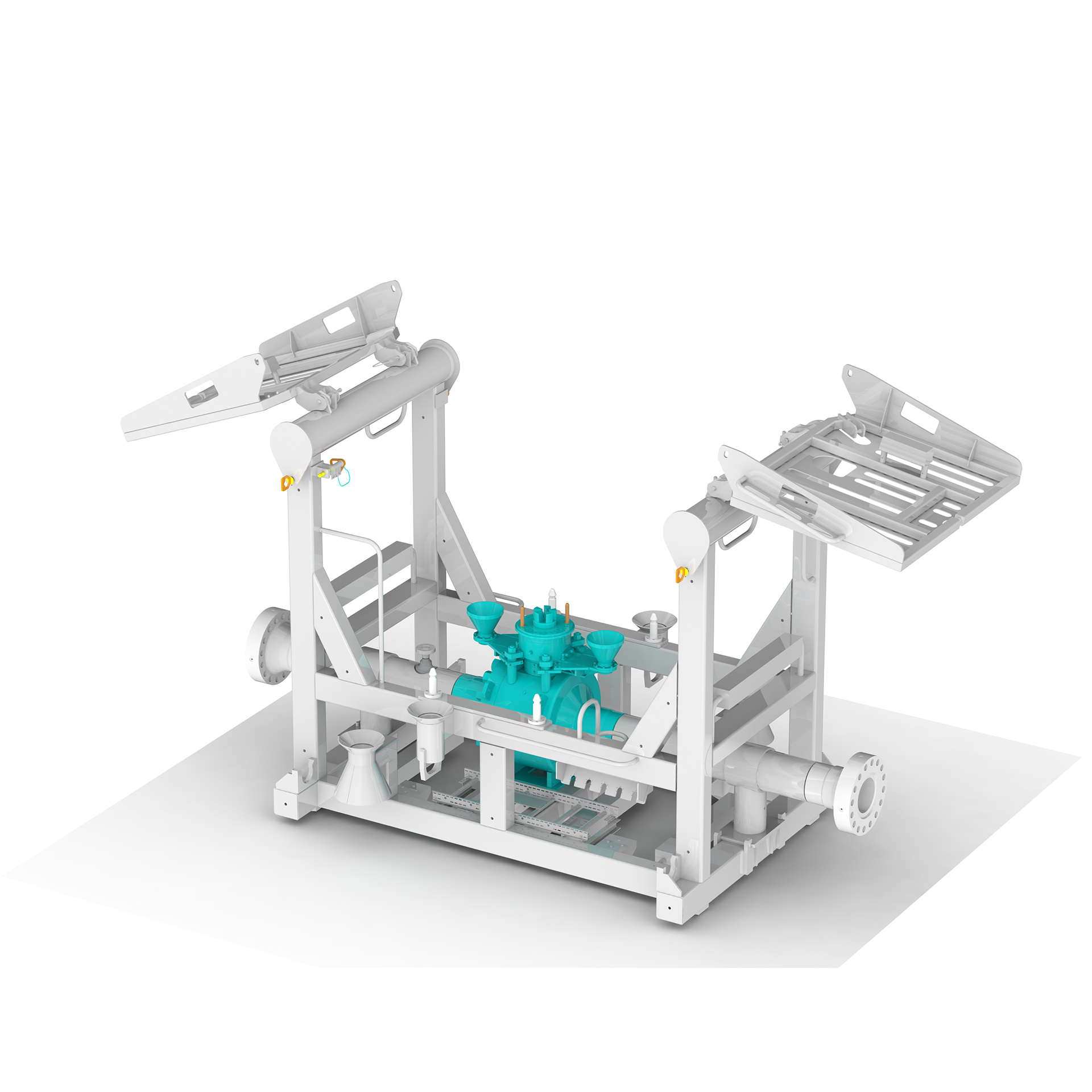
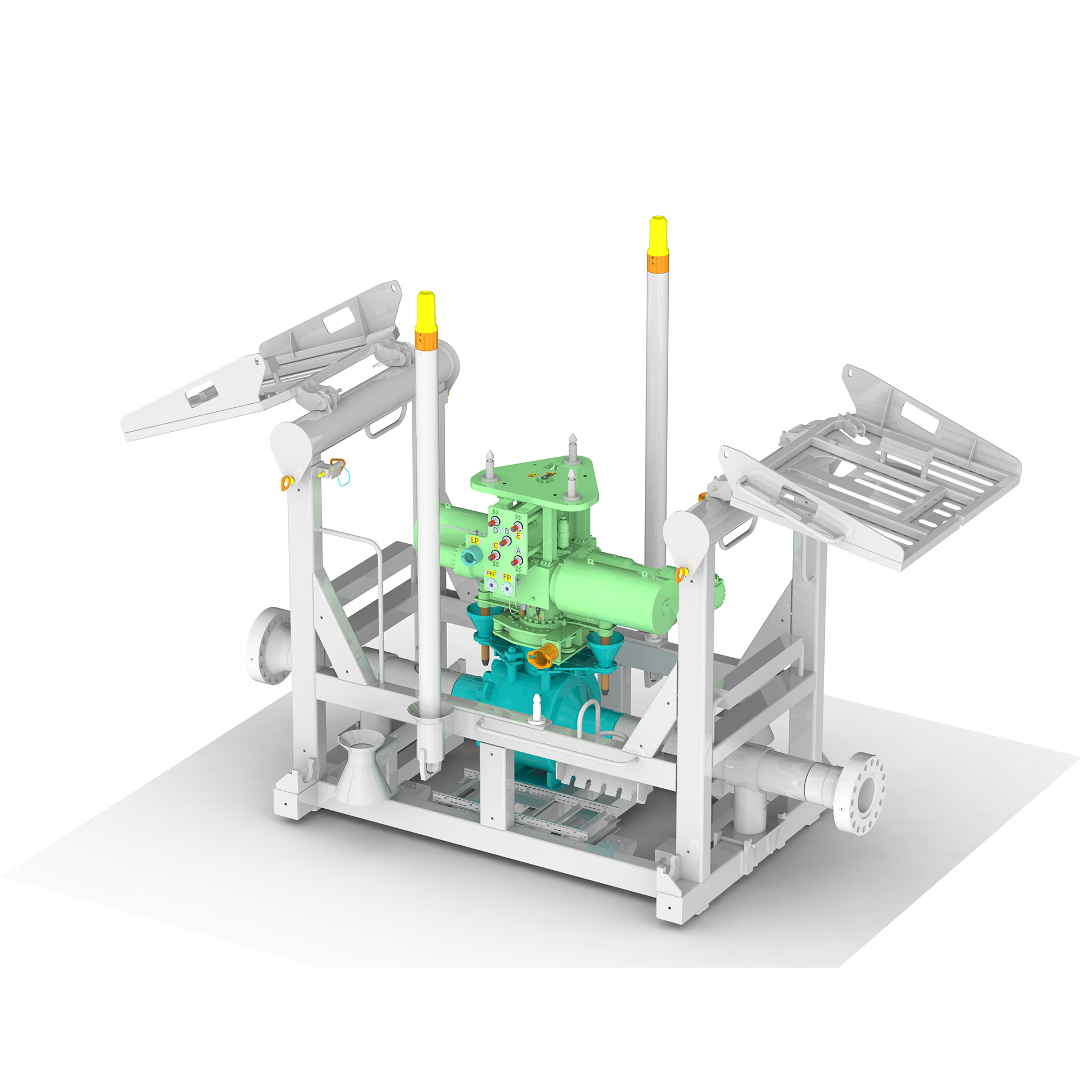
The actuator will then be recovered to surface by lifting the ART. The recovered actuator is then placed in an empty transportation skid.
A new replacement actuator is provided in a second transportation skid for installation on the subsea structure.
The transportation skids are used to store the ART and/ or actuator.
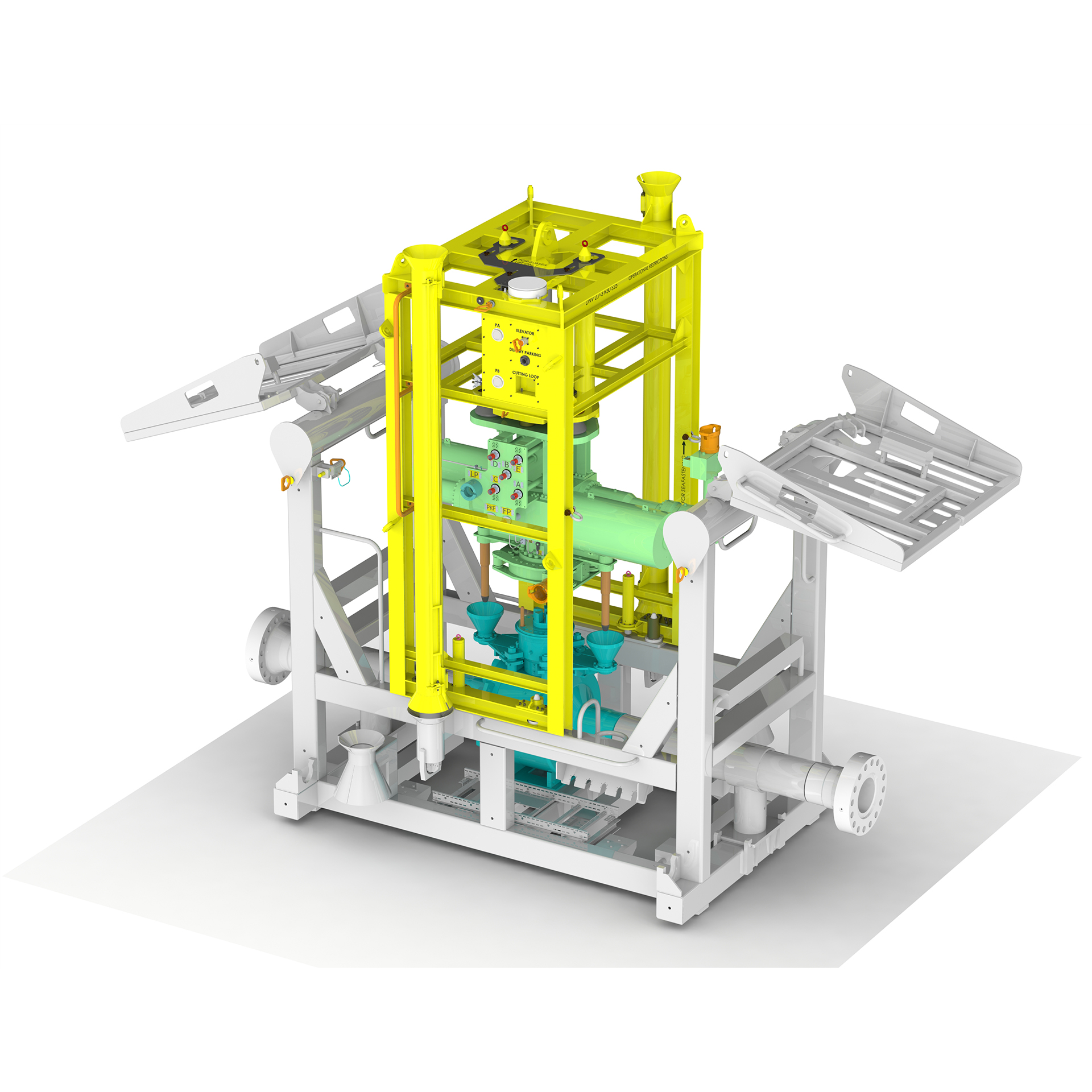
Key features
- Quick replacement of Horizontal SSIV Actuator
- DNV-ST-E273 2.7-3 Portable offshore units
- Payload: 8500 kg
ART has successfully been tested with 5° offset on landing base, and integrated adjustment cylinders (pitch, roll, x- and y-plane movement) can be used for alignment with valve.



